Posted on Thu 26 May 2016
Hand in Hand: Design and Research
Excuse the title's pun... Time to report! Wow, keeping a more-than-full-time job and a blog is hard work. Over the past two weeks I have been sketching ideas for hands with alternative looks - unconventional shapes, features, colours. I can’t really show much because our most recent designs…
Posted by

Project
New and Emerging Talent residencies 2015
From July to September 2015, robotics startup designer Vitória Maurício, game designer and producer Roz Dean and composer and designer Thomas Williams will be joining us for the Pervasive Media Studio’s 2015 New and Emerging Talent residency programme. The programme enables those at an early…Excuse the title's pun... Time to report! Wow, keeping a more-than-full-time job and a blog is hard work. Over the past two weeks I have been sketching ideas for hands with alternative looks - unconventional shapes, features, colours. I can’t really show much because our most recent designs haven’t been released yet, but I have 'some' ideas... We love to think up creative designs with unusual features, like the one we made for Grace.
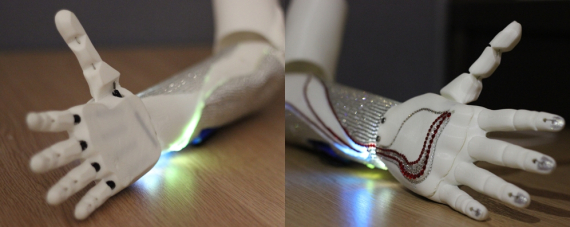
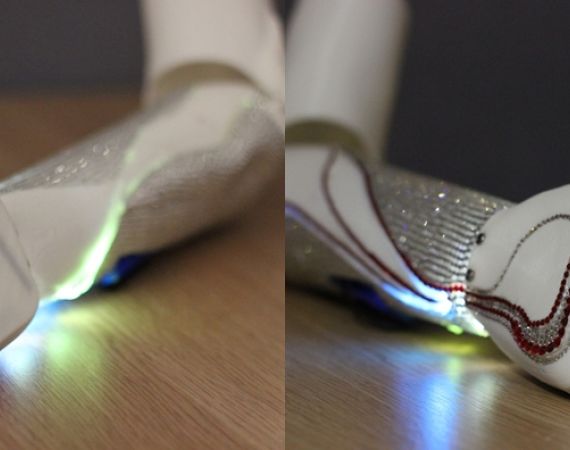
It is really important for us to create forearms with more dynamic and customisable looks. We try to base our design decisions on testers feedback - and have been told by people who wear prosthetics, that prosthetic arms currently in use are mostly a bit too heavy, some of them uncomfortable and they can get too warm or ‘itchy’ at times. So we want to explore different materials - we have experimented with several flexible materials and have even made our own filament with the help of OmniDynamics. I have sketched some ideas for more breathable designs and at the same time it is really important for me to keep talking to the mechanical and electronics engineers in the team to make sure we can incorporate all the things we need to (cabling, sensors, vibration motors for implementation of haptic feedback etc.) in the hand, arm and still make it 3D printable, comfortable to wear and look cool! This is no easy task.

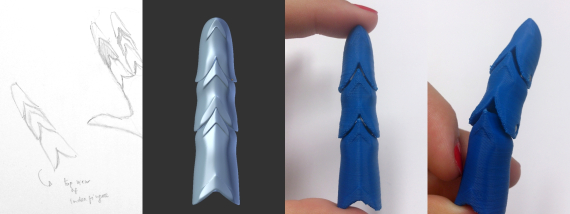
I have sketched ideas and printed a couple of small tests as well. The previous prototype of our prosthetic hand can be printed in one piece because the hand and joints are all made from the same flexible material - NinjaFlex. It will be challenging to incorporate the (new) mechanisms we are currently implementing to move the hand, in something with an alternative shape, but modeling and printing some tests is a good way to start.
Alongside design work, I have also been preparing the workshop we will run at the Pervasive Media Studio this Wednesday (TOMORROW!) - with great support from lovely user/design research intern Beverley Griffiths. It will be a nearly all-day workshop to gather feedback on the current stage of development of our robotic hand so that we can continue developing it through informed, structured decisions. It will include several activities to engage attendees in multiple ways and gather feedback on aesthetics, hand functionality and haptic feedback implementation. A full report on tomorrow’s workshop will follow soon!